VEX In The Zone



Robotics //
The last challenge that I would compete in was called "In The Zone", and it had teams stacking cones. The cones could be stacked on one of two tall stationary goals, or on one of the eight mobile goals scattered across the field. If a team moves the mobile goals over horizontal poles that go across two of the corners they get more points, depending upon which zone it ends up in. The main restriction for the robots this time is that a robot is only allowed to be holding one cone at a time, unless the cone is stacked on top of a mobile goal.
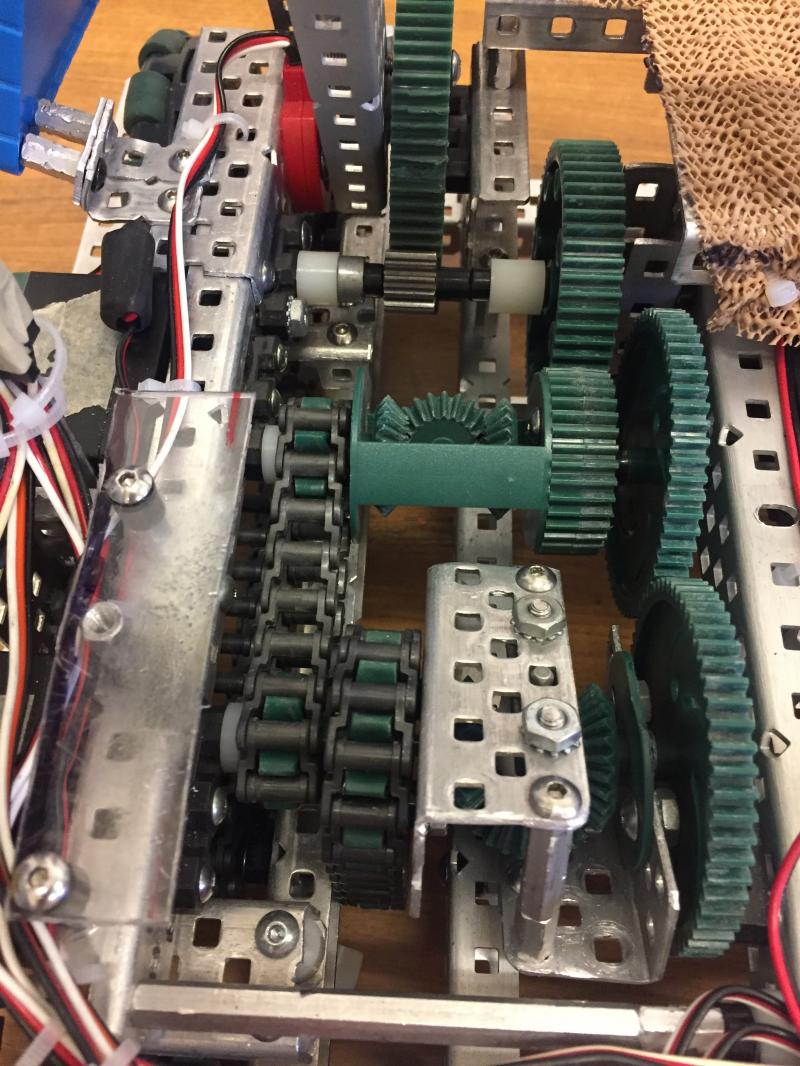
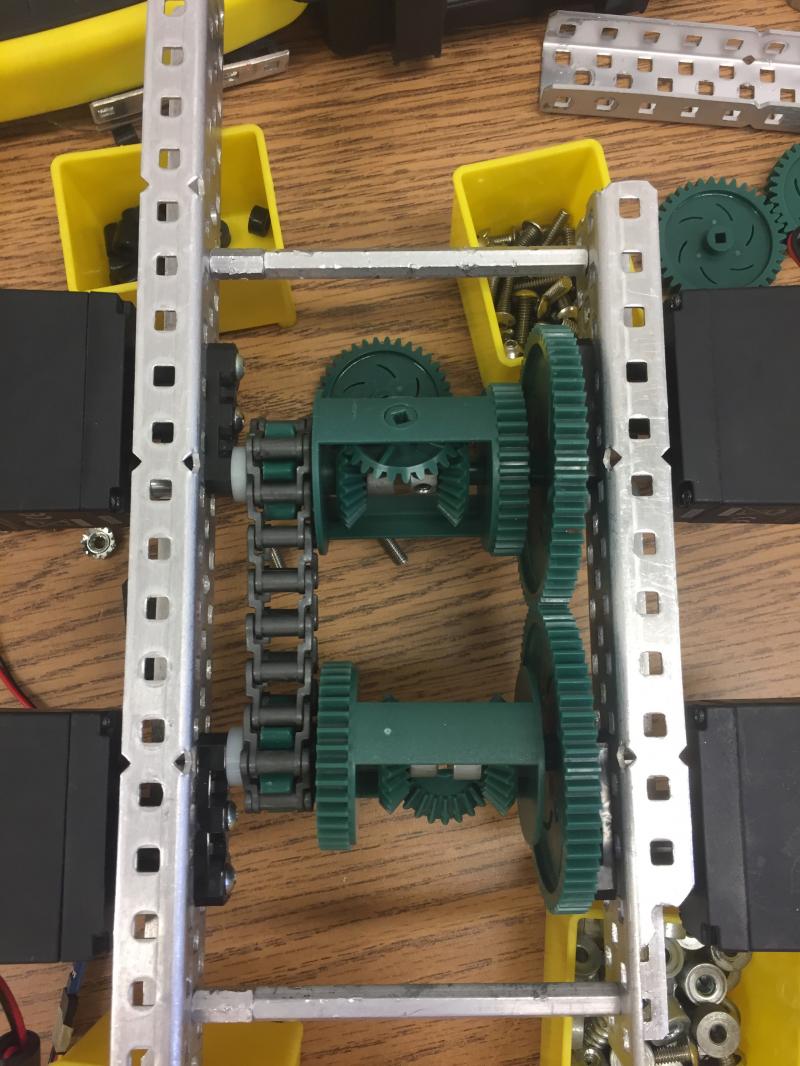
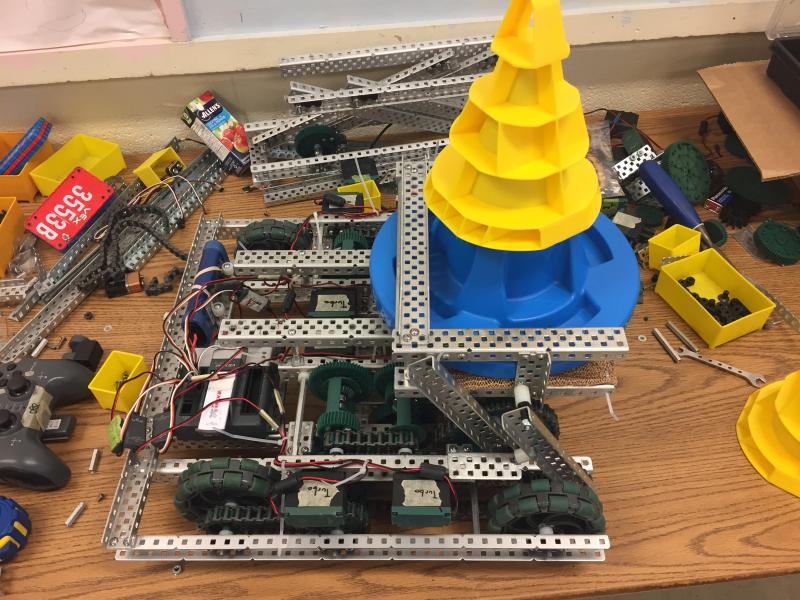
Drive and Mobile Goal Lift System: Between this competition season and the last one, I had come up with an idea for a passive transmission, and I spent time figuring out if it was actually a feasible idea. It was based around the fact that if the two ends of a differential spin opposite ways, then then differential body will stay still, but if the two ends spin the same way than the body will spin. The system has four differentials in total, with two on either side. This transmission was used to power both the drive and a simple four bar that lifts the mobile goals. The one that I have built works quite well, but it took more time to build than the rest of the robot, and it required custom-built differentials to deal with higher amounts of torque. Half-way through this season I learned about a more efficient type of transmission that is also passive, but I would have had to rebuild the majority of the robot to implement it.
Lift: The lift was a simple lightweight double reverse four-bar, that only needed two motors to power it. The design was heavily influenced by the one I had created three years ago, except with an emphasis on being lighter, as it was only required to lift the cones which were fairly light. As well, there was an arm on the end of this lift to allow for horizontal translation of the cone, and we powered it with either one or two motors, depending upon whether or not we were using the other motor.
Intake: The intake was changed quite frequently, and required more iterations than any other part of the robot. At first it was just two parallel pieces of metal with several zip-ties pointing towards each other, but this intake was hard to aim and held the cones much too loosely. For the next competition we planned on having a powered claw, but the claw was finished in time so all we did was extend the metal pieces and add more zip-ties. Surprisingly, we won this competition because the best bot at the tournament (5225A) picked us because they liked the power of our drive system, which we had shown off in the previous tournament when we faced off in the finals. The claw was constructed from lexan, and was powered by a single motor. The inside of the grip had four convex curves, which would slightly rotate the cone so that it was gripped securely no matter what direction the cone had been facing. This claw was much more successful than the previous intake, but due to drive failures we were only able to make it to the semi-finals of the next competition. After this competition we saw a new intake design online, and spent the next month replicating and improving it. The idea was to have a curved strip of lexan that could be pushed down onto a cone and then grip it. To release the cone, the robot just had to place the cone on a stack of other cones and then keep pushing down, which made it much more efficient than other methods. This design worked even better than the claw, but it kept breaking, and we had difficulties remaking versions of it that worked well.
At the provincial competition, our team had an inconsistent record and the robot spent too much time unable to move properly due to a cut in the wires around one of the lift's joints. Alliance selection was hectic because the team that was in the number one seed had gotten an easier schedule than many of the other teams, the other top teams didn't want to alliance with them, and once a team had denied an alliance request they could not accept any other requests. We were expecting to be the third alliance member of one of the better alliances, but instead, we were the first pick of the fifth seed, despite being placed somewhere near the 30th seed. Unfortunately, we had to face one of the best bots at the tournament in the quarter-finals, and because it was obvious that we couldn't score faster than them, we had to resort to defense and stopping them from scoring. We managed to slow them down enough to allow our alliance partner to outscore them, but for both matches we played we were disqualified for two different reasons (Later analysis of a recording of the match shows that the second disqualification was due to poor reffing, but there's nothing to be gained by thinking about it now). We did win the innovation award though, for the amount of thought that had been put into the passive transmission. However, that was not the end of robotics for me, as our junior team had just managed to grab a spot to the world championships by having a high enough Skills score, and they wanted my help to improve their robot. It may not have been a wise idea, but we rebuilt their robot with just over a month of time left, and I was able to try out the other passive transmission idea. The design had a lot of potential, but we underestimated how much time it would take and its performance was sub-par.
The live stream of the provincial competition can be found here.