VEX Toss Up


Robotics //
The challenge this year was to get various sizes of balls over and under obstacles and then to score them in vertical tubes in the far zone. It was my first year doing VEX robotics, and I only had a few months to learn how to build a competitive VEX robot. I was the leader of my team, which consisted of me and a friend. We were decently successful, but our lack of familiarity with the other teams meant that we suffered dearly during alliance selection, and never qualified for the provincial championship.
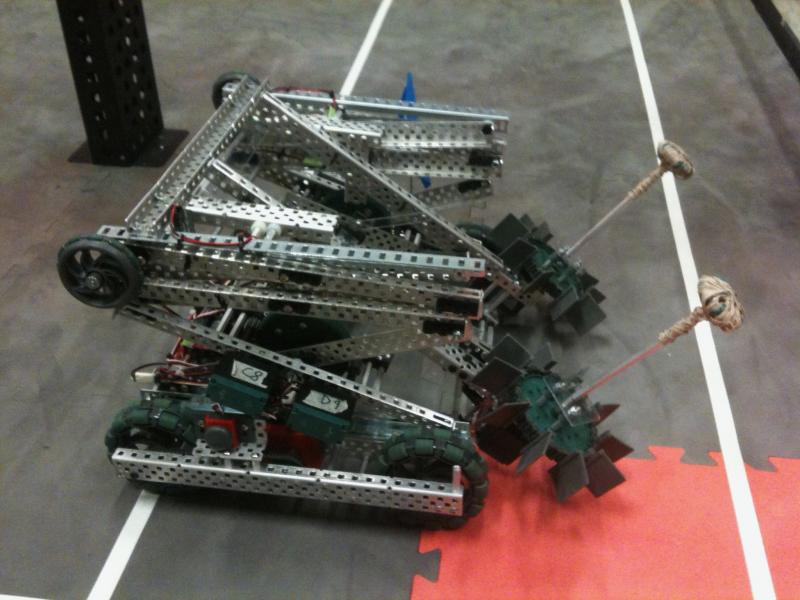
-Scissor Lift: With only limited knowledge on building, we opted to build a simple scissor lift. This lift also helped to keep the robot more stable, as it was completely vertical and kept the centre of mass in a more central position than the commonly used double-four-bar.
-Multi Purpose Intake: After seeing the potential of this style of intake, we decided that it would be best if we used it as well. However, our robot's lift system at the time did not allow for a multi-purpose intake, and we had to both redesign the lift and design the intake to achieve optimum intake capability.
-Third Set of Wheels on the Lift: Putting a wheel on either side of the lift near the back seemed like a strange idea at the time, but it had some unexpected and very beneficial consequences. Primarily, it meant that the robot could right itself if it had fallen over during a match, but it also allowed to the robot to become a mobile wall-bot if the lift was extended while being tipped over.
During this competition season we competed at three tournaments, and were always within the top eight teams after the round-robin matches, but unfortunately we never managed to qualify for the provincial championships. Had we took part in the skills challenge at a tournament, we would have definitely qualified for provincials, maybe even worlds. This was a lesson that would help us significantly next year.